
Even with fast, efficient mobile robots as developed by Gearu, the available chemical space for new materials is enormous. We need better ‘maps’ to guide robots searches.
In a paper published today in Nature Communications, a team led by Gearu CEO, Prof. Andy Cooper (University of Liverpool) and Prof. Graeme Day (University of Southampton), has demonstrated a new way to do this.
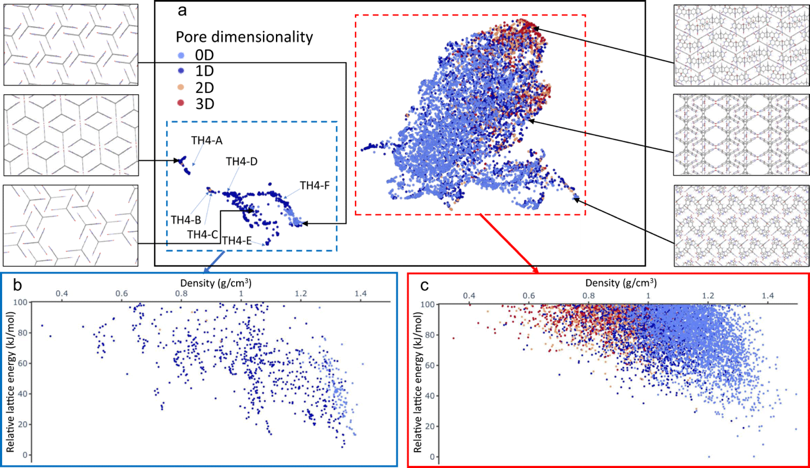
Energy-structure-function (ESF) maps (Nature, 2017, 543, 657) are computational maps that relate a material’s structure to its properties, or function. As such, ESF maps have strong potential to guide mobile robot chemists in their search for better materials. There is a problem, however: unlike traditional 2-D maps, ESF maps are high-dimensional descriptions of a very complex energy-structure-function space. As such, they cannot be read in a simple way, either by humans or by robots – we need more sophisticated methods for navigating these maps, both to identify areas of interest and specific ‘landmark’ structures.
In this new Nature Communications paper, the team addresses this by using a method called the Uniform Manifold Approximation and Projection (UMAP) to learn a 2-D mapping of the high-dimensional porosity space for a range of hypothetical porous materials.
Prof. Andrew Cooper, Gearu CEO, said: “Imagine a mobile robot chemist that cannot only recognize a good lab result when it sees it, but also has a map in its brain that suggests where even better materials might be hiding. Given the high dimensionality of these spaces, it is likely that robots coupled with artificial intelligence might become better at these tasks than humans.”
The research team that published this work are pursuing these ideas further through an ERC Synergy Grant, “Autonomous Discovery of Advanced Materials (ADAM).”